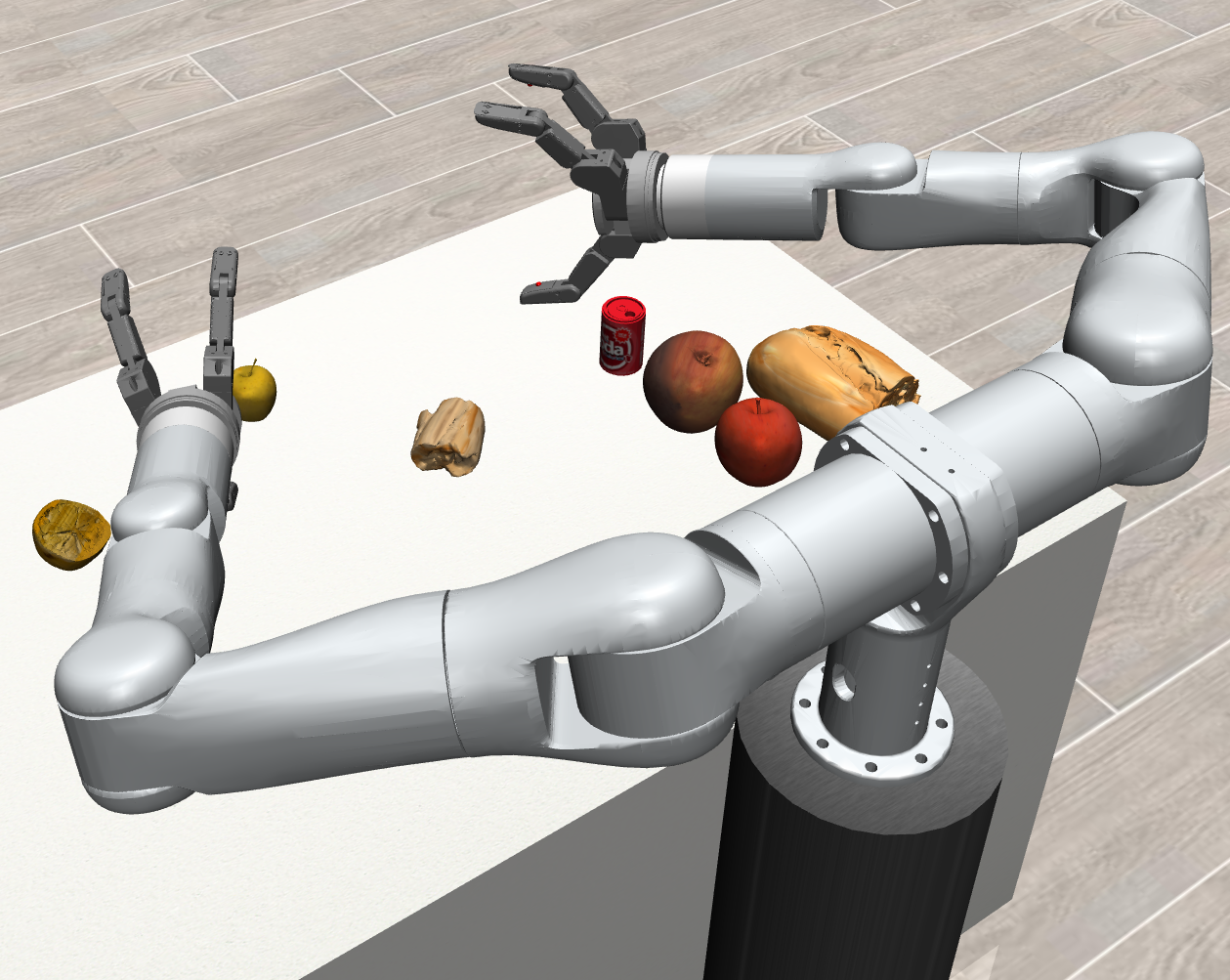
Contact-Rich Vegetable Peeling via Diffusion Policy Learning
Developed a contact-rich vegetable peeling solution on a humanoid dual-arm robot using CNN-based and Mamba-based diffusion policies, jointly modeling action trajectories and target contact forces from multimodal observations.